Hello learners. Welcome to The Engineering Projects. We all know that matrices have been used in the engineering field for a long time, and they have a vital role in the calculation of different data. Therefore, we are learning about some very special kinds of matrices that are usually introduced to engineers at a higher level. Till now, we have seen some general operations on matrices and also examined the special kinds of matrices. Yet, today, we are moving a step forward and learning about some complex types of matrices that require strong basic concepts. So, have a glimpse at the topics that you are going to learn, and then, we’ll start practicing.
What is a matrix?
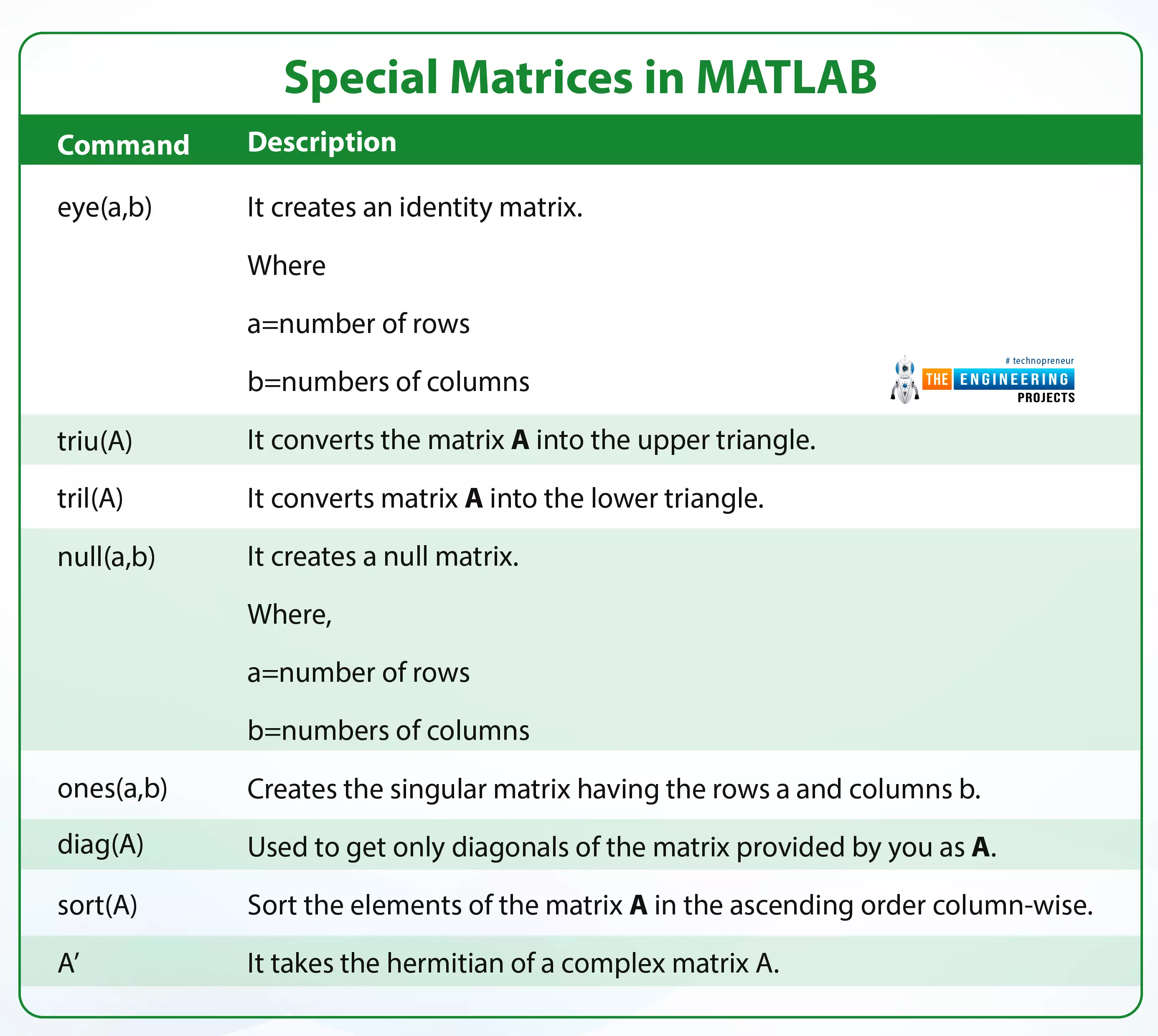
What are the different types of matrices that are less common?
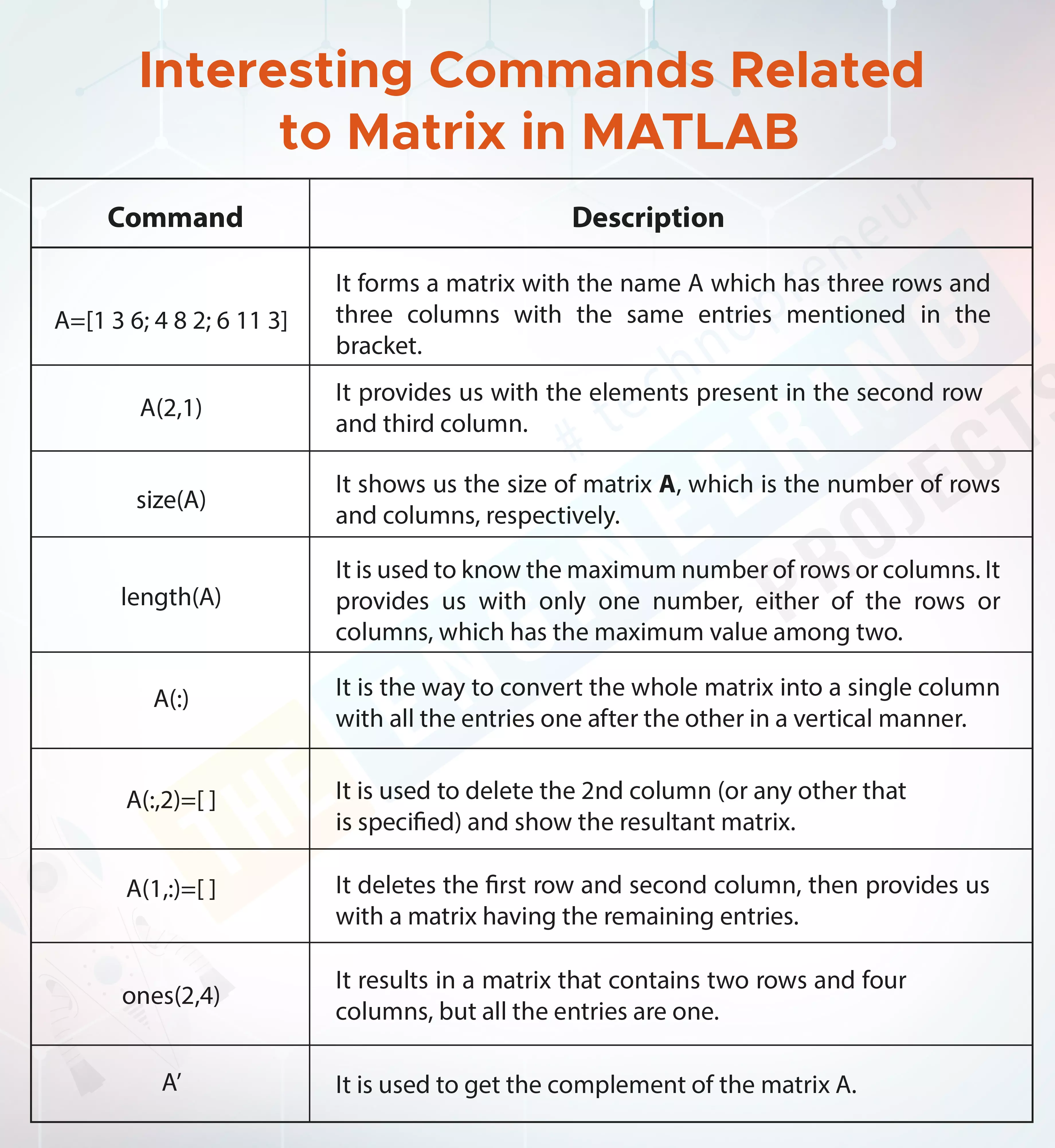
How can we implement some interesting commands in MAT ...
Hey students welcome to another tutorial in The Engineering Projects where we are going to learn a lot about matrices. If you are a beginner to the metrics, then you should go to learn the fundamentals of matrices. Yet, if you know the basic introduction, you are at the right lecture because we are learning about the special kinds of matrices and you are also going to see the matrices in action using MATLAB. So, here is a simple list of today’s topics.
What is a matrix?
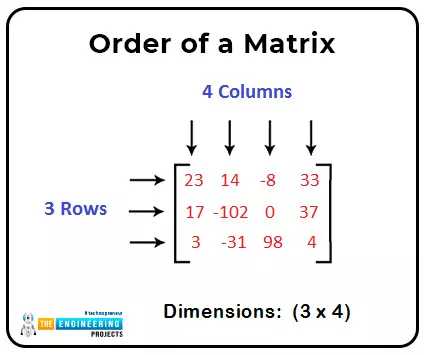
How can we identify the matrix with the help of its general form?
What are the different types of matrices?
What is the concept of transpose while dealing with matrices?
How can we implement these types of matrices in MATLAB by different commands?
What is a Matrix?
A matrix is a type of array that stores da ...
Hey peeps, welcome to The Engineering Projects. We are talking about matrices, and if you want to learn them from scratch, you must go to the introduction to matrices in MATLAB. Today, we are learning how to perform different arithmetic operations on matrices. You will also see some interesting commands that are only applicable to the matrices. Here, it is important to notice that in MATLAB, the matrices are performed in the command window and there is no need to have the programming skills to perform them. Even if you are new to programming, you can easily perform the operations in MATLAB. We’ll discuss different basic operations on the matrices and will also perform each of them in MATLAB. Most of them are urinary operations and some of them are binary. Here is a small glimpse of today’s ...
Hello, learners welcome to The Engineering Projects. We are working on MATLAB, and in this tutorial, you are going to learn a lot about matrices in MATLAB. We are going to learn them from scratch, but we will avoid unnecessary details about the topic. So, without wasting time, have a look at the topics that you will learn in detail.
What is an array?
What is the matrix?
How can we declare a matrix in MATLAB?
What are the different types of matrices?
Can we find the unknown values of two equal matrices?
How can we solve the simultaneous equation in MATLAB?
What is an Array?
In this world of technology, the use of data is everywhere, and therefore, we can say there is a need for arrays in every field. You will find the reason soon. But before this, look at the introduction of a ...
Hello readers, Welcome to another tutorial about the signal and system. In this lecture, you are going to read details about the ramp response of a signal. In the past lectures, we have been dealing with different types of responses of LTI systems, and therefore, we know that linear invariant systems, or LTI systems, are those which follow the rules of linearity and are also time-invariant. So, at present, our focus is to examine what happens when the ramp signals are fed into the LTI system and which type of output signal we receive. Here is a glimpse at today’s topic that we will learn deeply.
What is the RAMP signal?
How can you define the ramp response?
How to use the ramp function in MATLAB to get the ramp response?
What are some important properties of the ramp function?
How i ...
Hey readers, welcome to another interesting lecture of this series in which we are studying signals and systems. In the present lectures, we are learning the details about the responses of LTI systems, and today, you are going to learn the step response. We also talked about the impulse response and frequency response, and therefore, this lecture will be easy for you to understand because it is, somehow, related to the impulse response. If you are new to this concept, do not worry because there will be a revision of important points side by side. Have a look at the list of today’s concepts:
What is an LTI system?
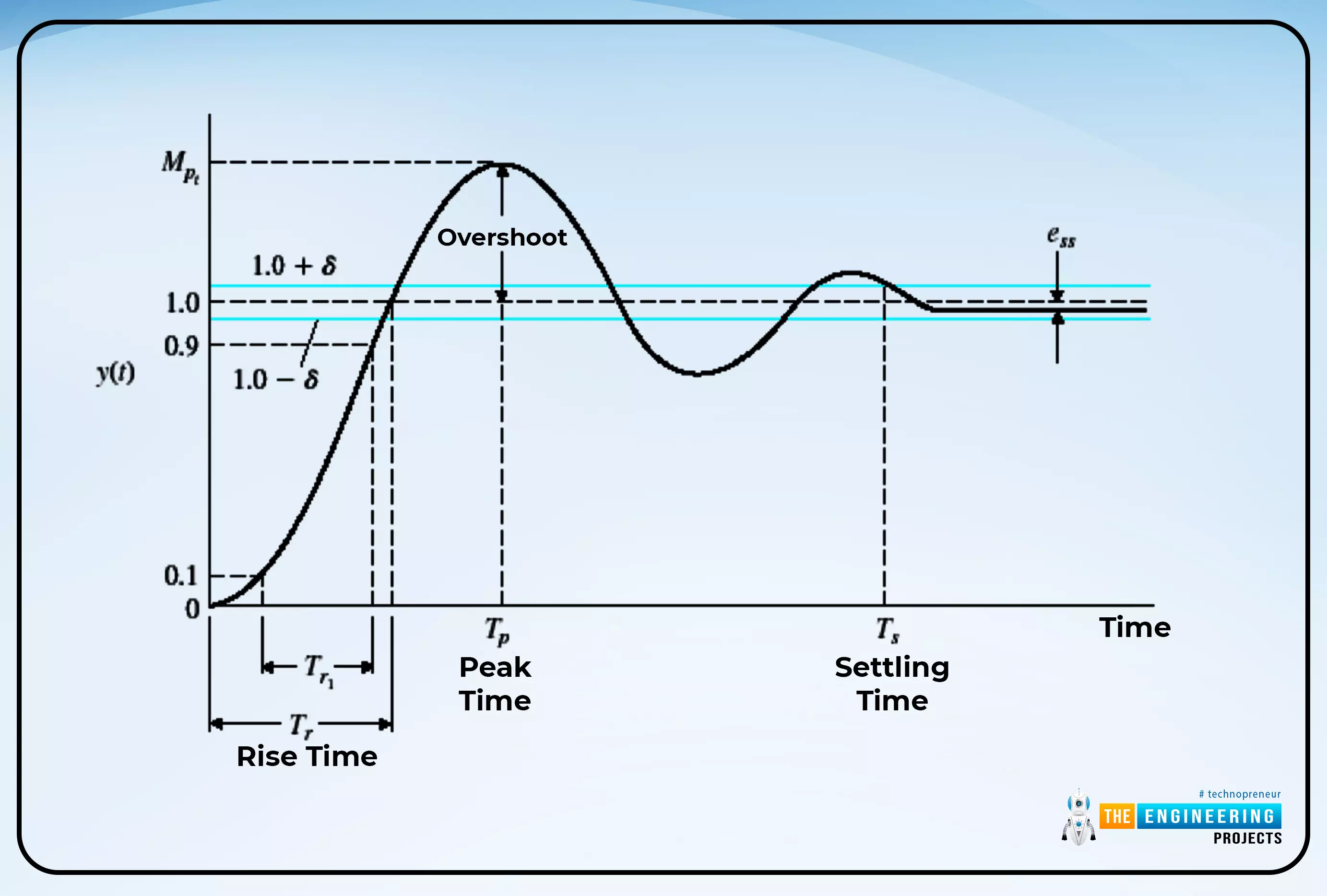
How do you define the step response of an LTI system?
What is the code to run the step response of signal in MATLAB using different functions?
How can you find the detail of t ...
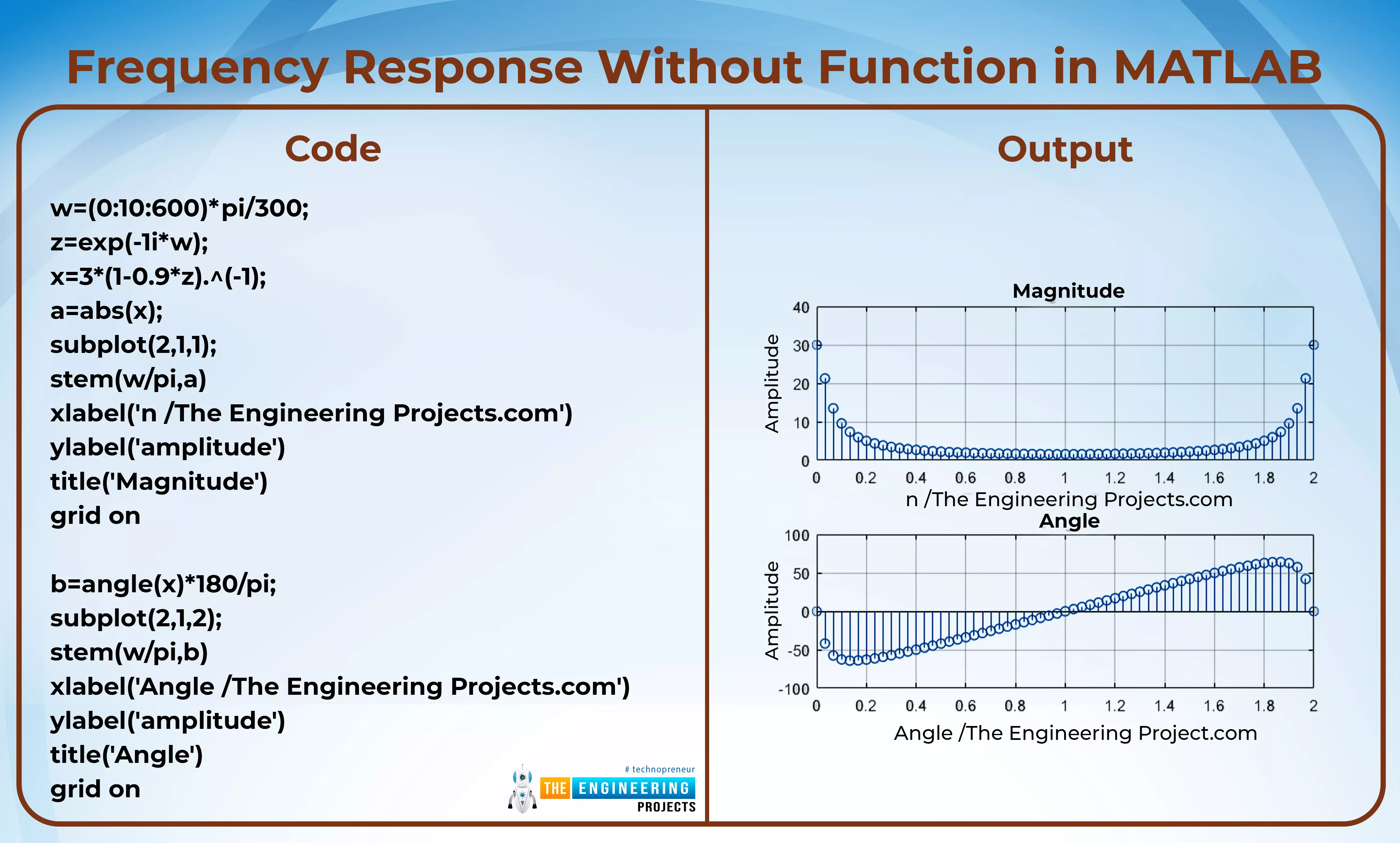
Hello learners, Welcome to another tutorial on signals and systems. We are learning about the responses of the signals. We all have experience in situations where the change in the frequency of a system, such as radios or control systems, results in a change in the working or result of that system. So we have the idea that frequencies play an important role in different types of systems. In the previous lecture, we saw the impulse response of the system. Our mission today is to learn about the frequency response of the LTI system. We will learn all the basic information about the topic and will revise some important points as well. To do this, have a look at today’s concepts:
What is the LTI system?
What is frequency response?
How is frequency response performed without the function i ...
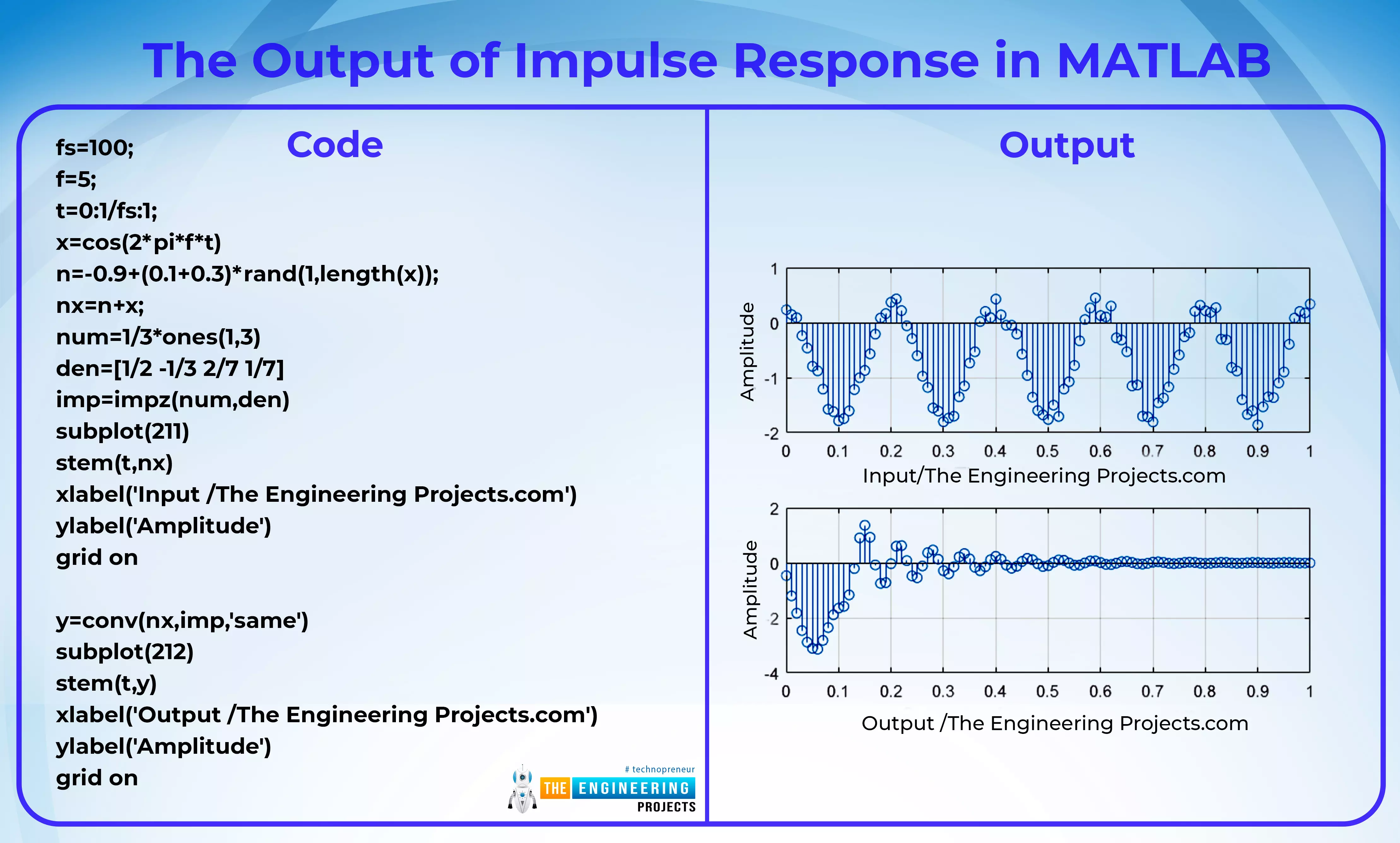
Hello learners, welcome to another topic of signals and systems. We hope you are having a reproductive day and to add more information in the simplest way to your day, we are discussing the responses in discrete-time signals. If you do not get the idea of the topic at the moment, do not worry because we are going to learn it in detail and you are going to enjoy it because we are making interesting patterns in MATLAB as the practical implementation of the topics. Have a look at the points that we are making clear today.
What is the LTI system?
What is impulse response?
How can we get the impulse response in MATLAB?
How can we have the output signal using codes and impulse response in MATLAB?
As we have learned so far in this series, there are two types of signals based on the ...
Hey, pupils welcome to the next session about the Fourier transform. Till now, we have learned about the basics of Fourier transform. It is always better to understand all the properties of a mathematical tool to understand its workings and characteristics. You will observe that most of its properties are similar to the topics that we have discussed before, and the reason is, that all of them are transforms, and the core objective of these transforms is the same. We have learned about the simple and easy discussion of the Fourier Transform, but when dealing with complex problems, it involves the usage of different properties so that we do not have to repeat the calculations all the time to get the required results. Have a look at what you are going to learn today:
What are the basic prope ...
Hey fellows, Welcome to another lecture in the signal and systems series in which we are moving towards another transform. Till now, we have studied the Laplace and z transform and we, therefore, know the basic purpose of transforms, that is, to convert the signal from one domain to another. In today's lecture, we will be discussing the Fourier Transform, and you will enjoy its information because now we have a clearer idea of what we are doing and what the purpose of this transformation of a signal is. Here are the key points that we are going to consider:
What is the Fourier transform?
What is the journey Fourier transforms from start to end?
How do you define the types of Fourier transform?
Why is the Discrete Fourier transform important?
Why is the fast Fourier transforms named so ...