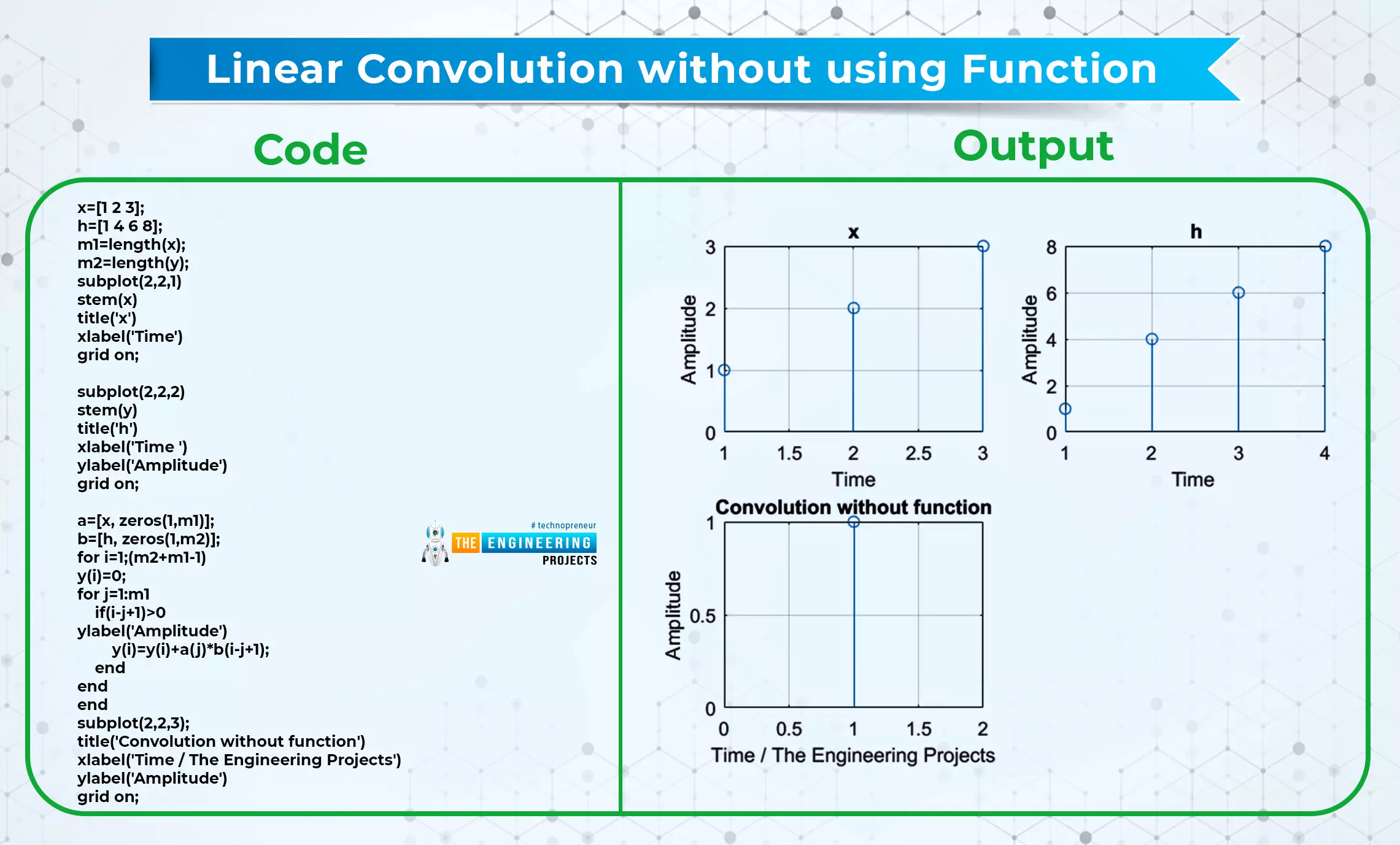
Hey pupils, Welcome to another lecture of this series on signals and systems, and this is the time to learn an interesting topic in which you are going to learn about the convolution of the signals. In the previous sessions, we have learned basic operations on the signals, and this time, you are going to know the convolution of the signals and different criteria that are related to this topic. Have a quick view of the concepts that will be clarified in this lecture: What is convolution? What are some basic types of convolution? How can you define the properties of linear convolution? How can you implement convolution in MATLAB using function and without function? What is the difference between linear and circular convolution? What is the convolution of signals? Convolution is ...
Hello Pupils, We are learning about signals and systems, and till now we have learned some basic information regarding signals, but we know a little about systems till now. We have learned about the system in our previous lectures. To have a clear concept, we have arranged this tutorial in which we are studying the systems and their classification. Have a quick glance at today’s topics:
What is a system?
What are the various types of systems?
What is the principle of homogeneity?
What is the principle of superposition?
How can we compare each type while keeping their differences in mind?
To keep things simple, we’ll also have examples of some of these signals. Yet, the first thing that we are going to do is to revise the basic definition of the system so that we may move forward. ...
Hey peeps welcome to The Engineering Projects. This is the third lecture of this series, and till now, we have discussed the introduction to the signal and system, and in the previous lecture, we learned about the classification of signals and the difference between some of them.
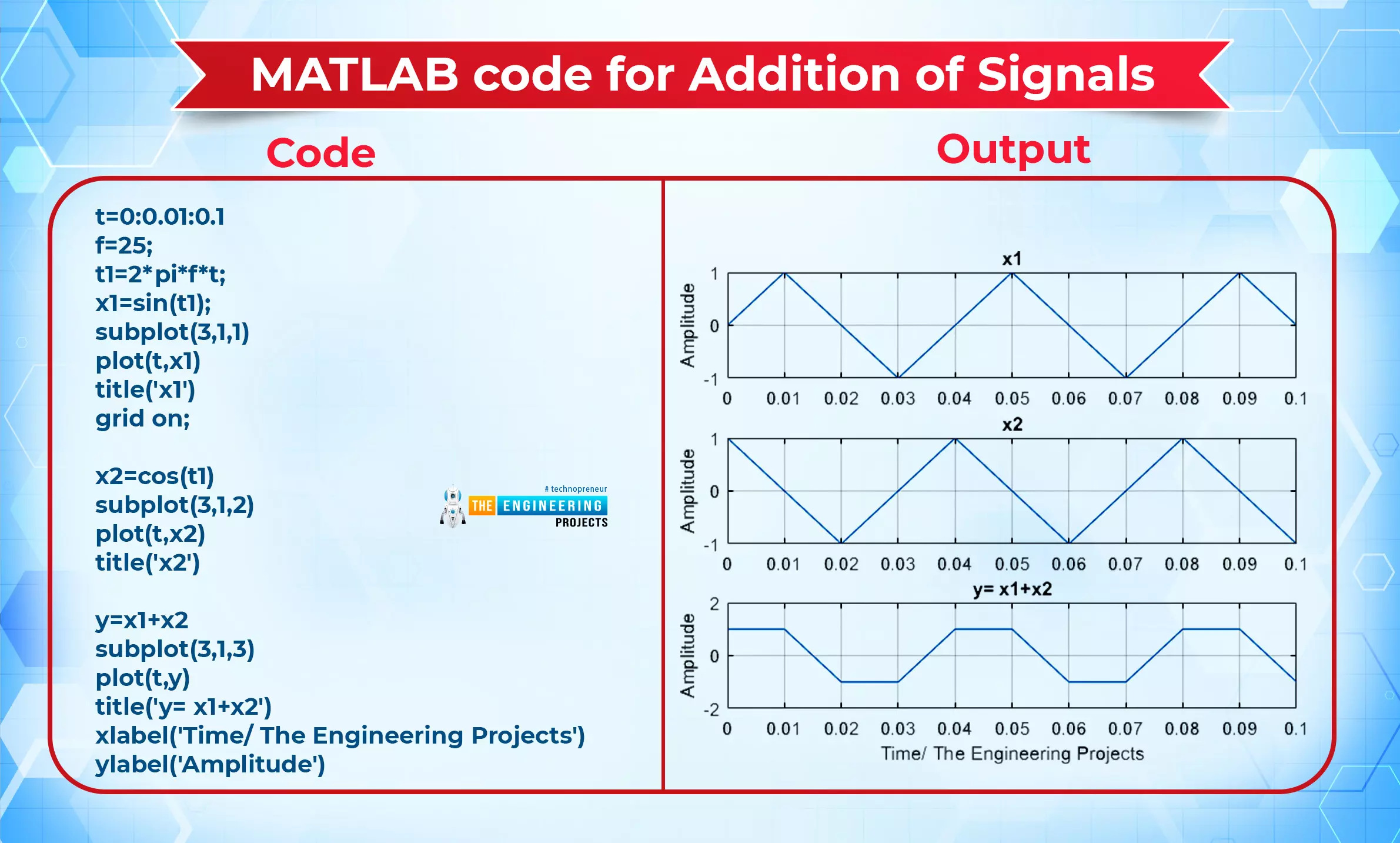
In the present day, you are going to learn the basic operations of signals, and it is amazing to note how you can play with these signals. The best thing about this series is that you are going to see every step with the help of MATLAB. Let’s have a quick glance at today’s topic, and after that, we will go through a detailed explanation.
Addition of Two Signals
Subtraction of Two Signals
Multiplication of Two Signals
Time Scaling (Compression and Expansion)
Time Shifting (Addition and subtraction)
R ...