Hello readers, Welcome to another tutorial about the signal and system. In this lecture, you are going to read details about the ramp response of a signal. In the past lectures, we have been dealing with different types of responses of LTI systems, and therefore, we know that linear invariant systems, or LTI systems, are those which follow the rules of linearity and are also time-invariant. So, at present, our focus is to examine what happens when the ramp signals are fed into the LTI system and which type of output signal we receive. Here is a glimpse at today’s topic that we will learn deeply.
What is the RAMP signal?
How can you define the ramp response?
How to use the ramp function in MATLAB to get the ramp response?
What are some important properties of the ramp function?
How i ...
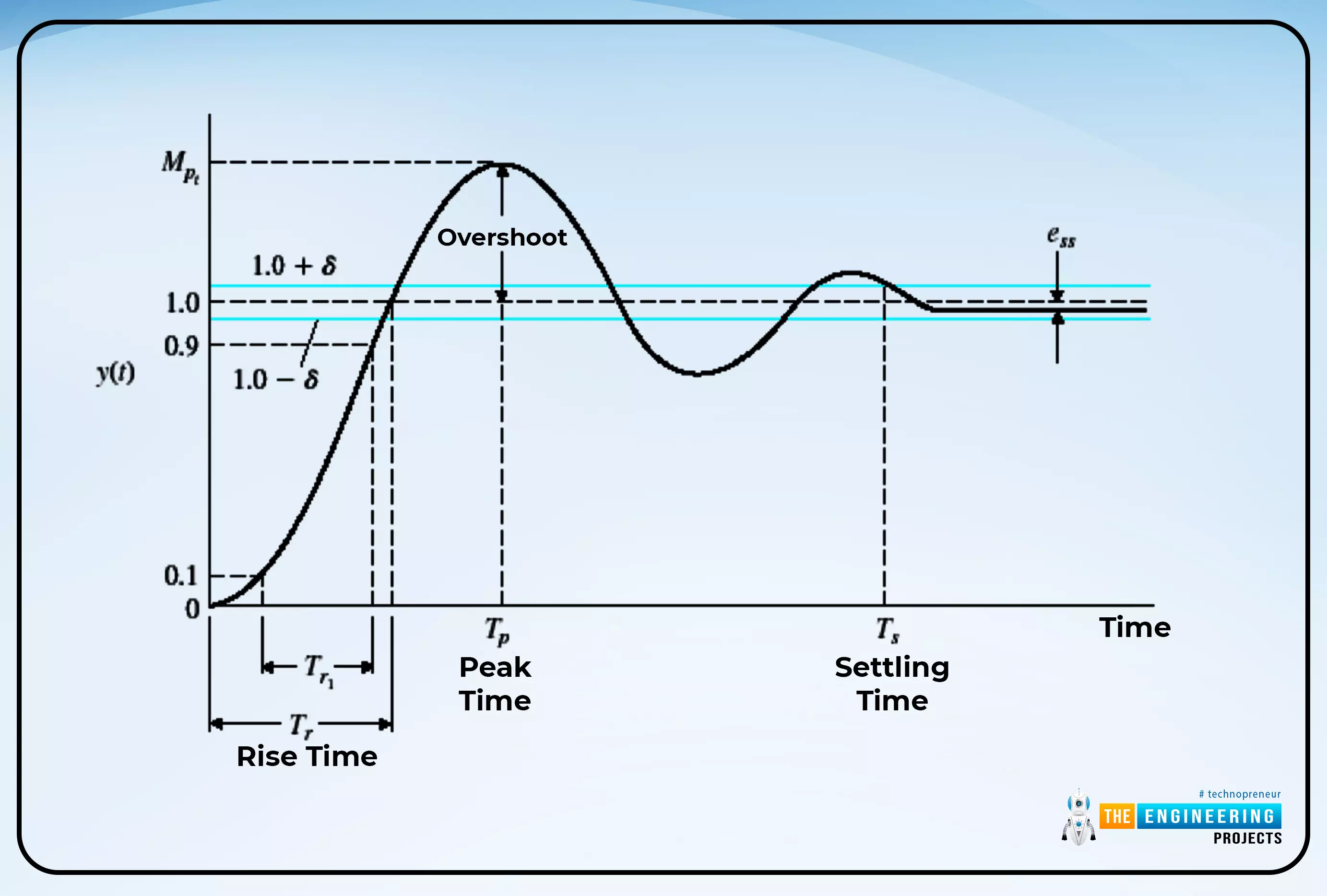
Hey readers, welcome to another interesting lecture of this series in which we are studying signals and systems. In the present lectures, we are learning the details about the responses of LTI systems, and today, you are going to learn the step response. We also talked about the impulse response and frequency response, and therefore, this lecture will be easy for you to understand because it is, somehow, related to the impulse response. If you are new to this concept, do not worry because there will be a revision of important points side by side. Have a look at the list of today’s concepts:
What is an LTI system?
How do you define the step response of an LTI system?
What is the code to run the step response of signal in MATLAB using different functions?
How can you find the detail of t ...
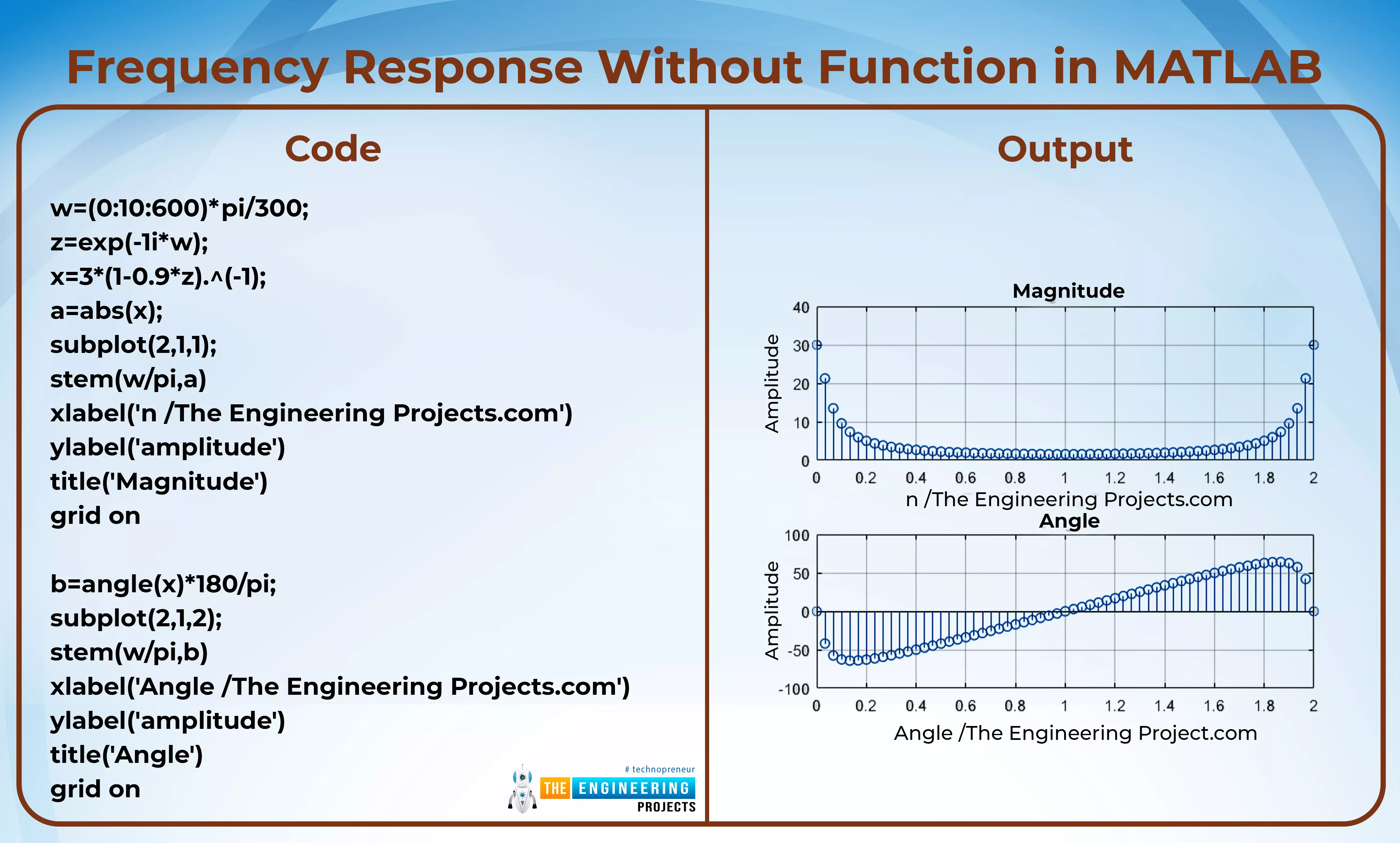
Hello learners, Welcome to another tutorial on signals and systems. We are learning about the responses of the signals. We all have experience in situations where the change in the frequency of a system, such as radios or control systems, results in a change in the working or result of that system. So we have the idea that frequencies play an important role in different types of systems. In the previous lecture, we saw the impulse response of the system. Our mission today is to learn about the frequency response of the LTI system. We will learn all the basic information about the topic and will revise some important points as well. To do this, have a look at today’s concepts:
What is the LTI system?
What is frequency response?
How is frequency response performed without the function i ...
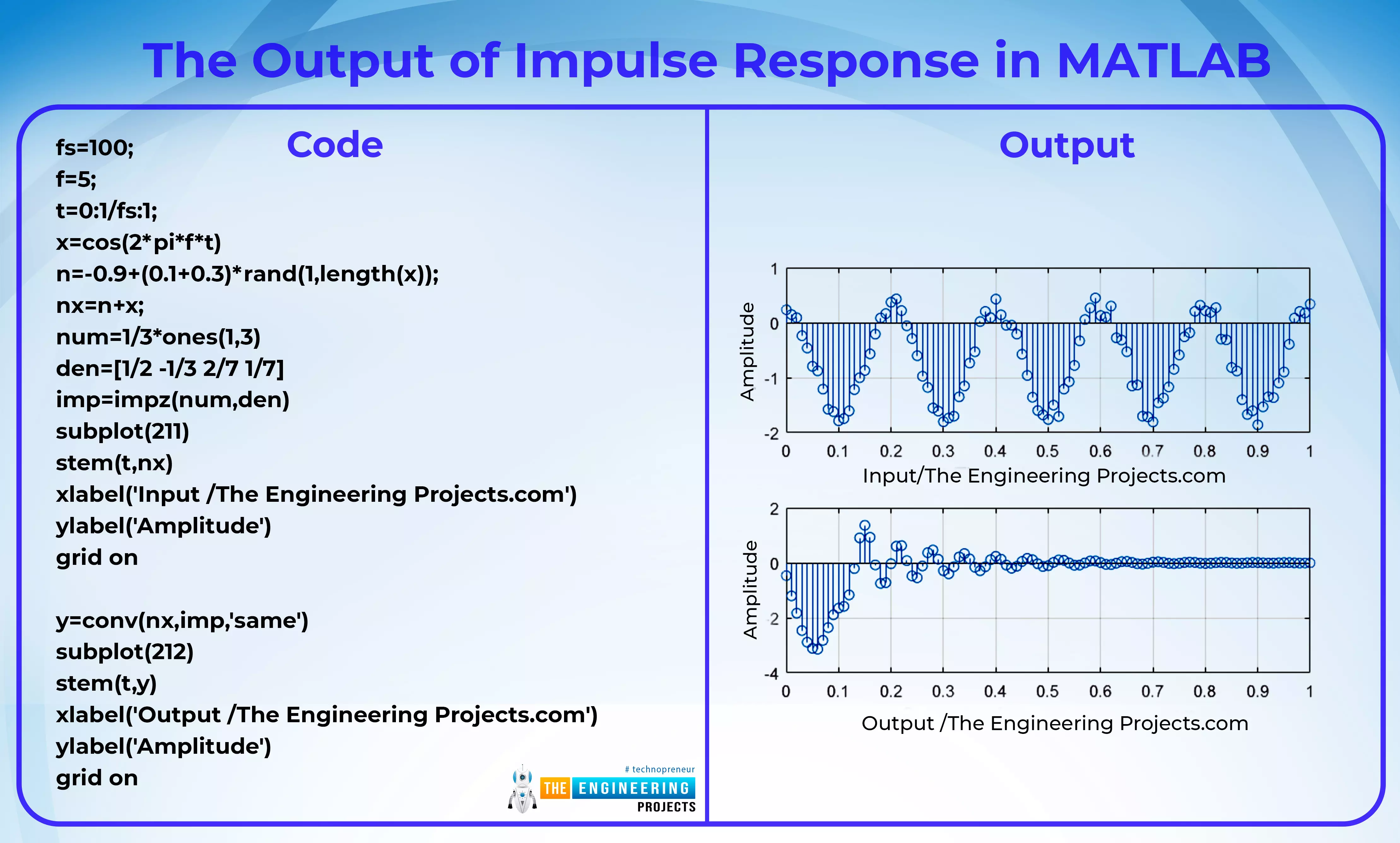
Hello learners, welcome to another topic of signals and systems. We hope you are having a reproductive day and to add more information in the simplest way to your day, we are discussing the responses in discrete-time signals. If you do not get the idea of the topic at the moment, do not worry because we are going to learn it in detail and you are going to enjoy it because we are making interesting patterns in MATLAB as the practical implementation of the topics. Have a look at the points that we are making clear today.
What is the LTI system?
What is impulse response?
How can we get the impulse response in MATLAB?
How can we have the output signal using codes and impulse response in MATLAB?
As we have learned so far in this series, there are two types of signals based on the ...
Hey, pupils welcome to the next session about the Fourier transform. Till now, we have learned about the basics of Fourier transform. It is always better to understand all the properties of a mathematical tool to understand its workings and characteristics. You will observe that most of its properties are similar to the topics that we have discussed before, and the reason is, that all of them are transforms, and the core objective of these transforms is the same. We have learned about the simple and easy discussion of the Fourier Transform, but when dealing with complex problems, it involves the usage of different properties so that we do not have to repeat the calculations all the time to get the required results. Have a look at what you are going to learn today:
What are the basic prope ...
Hey fellows, Welcome to another lecture in the signal and systems series in which we are moving towards another transform. Till now, we have studied the Laplace and z transform and we, therefore, know the basic purpose of transforms, that is, to convert the signal from one domain to another. In today's lecture, we will be discussing the Fourier Transform, and you will enjoy its information because now we have a clearer idea of what we are doing and what the purpose of this transformation of a signal is. Here are the key points that we are going to consider:
What is the Fourier transform?
What is the journey Fourier transforms from start to end?
How do you define the types of Fourier transform?
Why is the Discrete Fourier transform important?
Why is the fast Fourier transforms named so ...
Hello, readers. Welcome to another lecture on signals and systems where, on the previous day, we studied the transforms. A Z transform is used to change the domain of a signal or function. It is used to convert the signal from the time domain into the z plane. Now we are going a little deep into the discussion. Have a quick promo of the topic of today:
What are the properties of z transform?
What is the unit impulse of z transform?
What is the unit ramp of z transform?
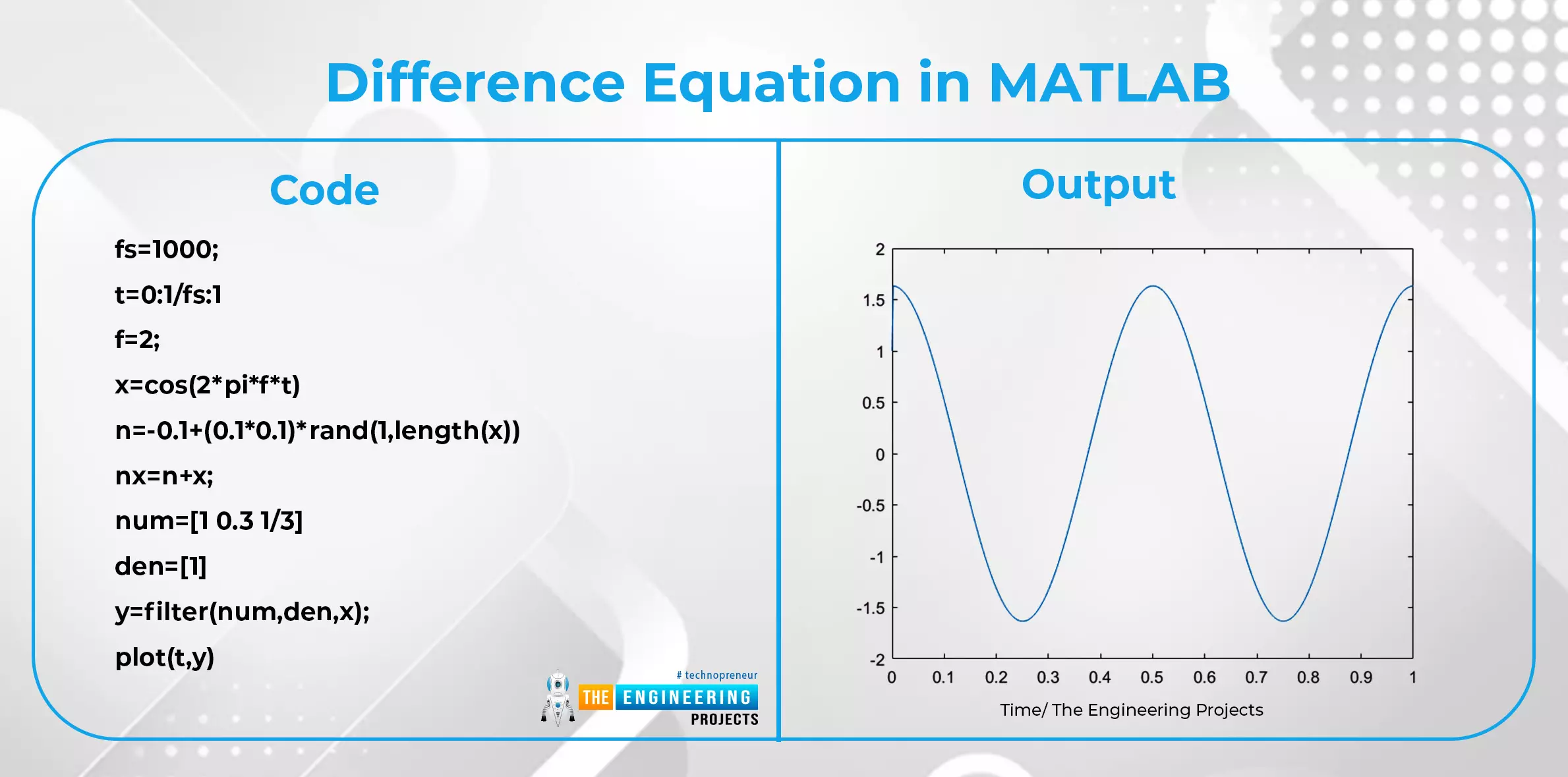
What is the difference equation and how is it related to the z transform?
What are some important applications of z transform?
We’ll go through each of these topics in detail, so stay with us to learn about all of them.
Properties of z Transform
Till now, we have seen the introduction of z transform along with s ...
Hey learners! Welcome to another exciting lecture in this series of signals and systems. We are learning about the transform in signals and systems, and in the previous lectures, we have seen a bulk of information about the Laplace transform. If you know the previous concepts of signal and system, then this lecture will be super easy for you to learn, but if your concepts are not clear, do not worry because we will revise all the basic information from scratch for our new readers. So, without wasting time, have a look at the topics of today.
What is z transform?
What is the region of convergence of z transform?
What are some of the important properties of the region of convergence?
How to solve the z transform?
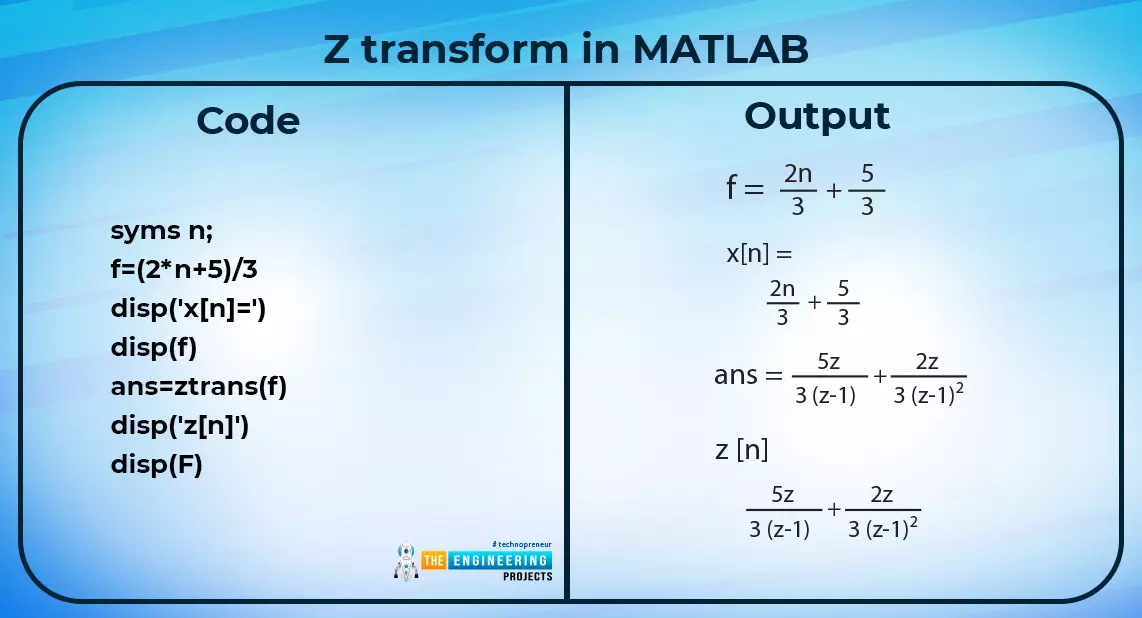
What is an example of the z transform in MATLAB?
What are the methods fo ...
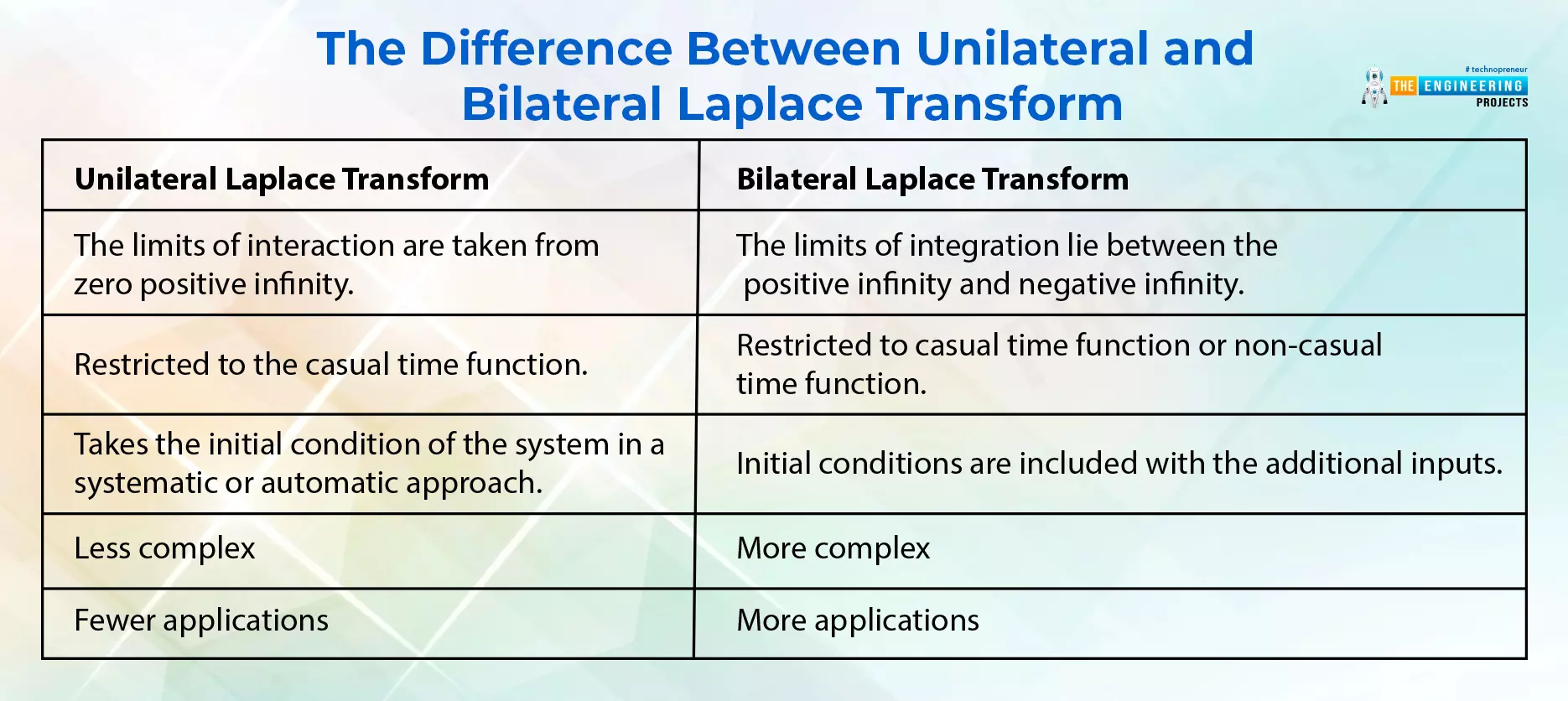
Hey fellows, in the previous lecture, we read the basics of Laplace transform and now, we want to go into a deep study about the same topic. Usually, it is important to learn all the properties of a mathematical tool to use it well, but we’ll focus on the basic and important properties of the Laplace transform to understand its concepts. Here are these:
Linearity
Time delay
Nth derivative
Frequency shifting
Multiplication with time
Complex shift property
Convolution of the Laplace transform
Time shifting
Time reversal
If you have read the previous concepts clearly, then these concepts should be clear in your mind. We’ll define all of them one after the other, and you'll understand each of them clearly.
Linearity in the Laplace Transform
We all know what linearity is. Yet, t ...
Till now, we have read about the basic concepts and functions in the signal and system, but let’s have something that is more practical and practice each and every topic thoroughly because if you have the understanding at each point, transforming will become an interesting game for you.Keep in mind, that transforms are an important topic in signal processing, but they were traditionally taught in the same way they were discovered: through calculus. This approach, however, does not reveal the true purpose of the transforms or why they are desirable. Well, let’s check the topics that we are going to learn about today:
What are transforms?
Which common transforms are used in signals and systems?
What is the Laplace transform?
How can you implement the Laplace transform in MATLAB?
What ar ...