





































Line Following Robotic Waiter using Arduino




















I have designed this Line Following Robotic Waiter using Arduino UNO board. I have also shared the code below and have given all the instructions but still if you got into any problem then ask in comments and I will solve your problems. I have also shared a video below which will show you the working of Line Following robotic Waiter. So, let's get started with it:
Line Following Robotic Waiter
First of all, let's have an overview of this Line Following Robotic Waiter:
Overview
- In this project, I have designed an arena which has four tables on it as shown in below figure:
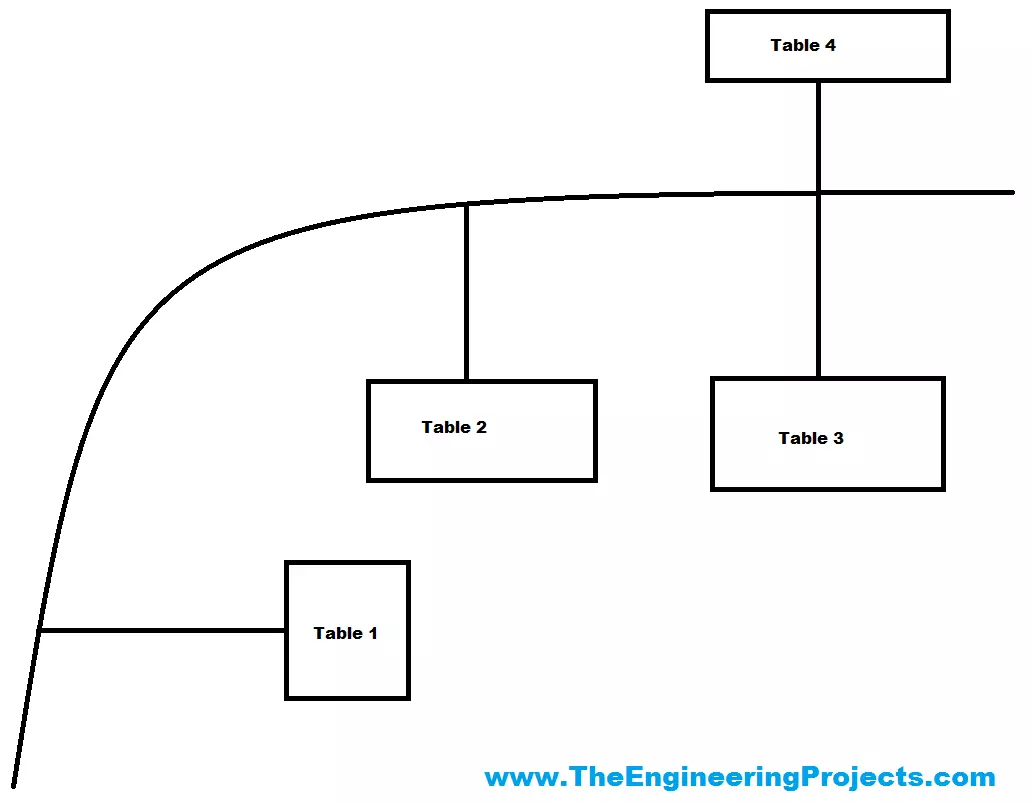
- The robot will start from the Table 1 side and whenever someone call it from any table then it will reach that table and take the order.
- After taking the order it will move back and will reach to the starting point again and wait for the next table call.
- Now let's have a look at the components required to design thi Line Following Robotic Waiter:
Components
- Let's have a look at the components list, which is required for designing this Robot. Here it is:
- Arduino UNO
- DC Motors
- RF Module
- 2 Relay Board
- IR Sensors
- These are the components required in order to design this Line following robotic waiter.
Mechanical Design
- I have designed a three wheeler robot in which there were two wheels at the front side with DC motors while a free caster wheel at the back side.
- I have used Acrylic Sheet as the body of the robot.
- The DC Motor I have used for designing this project is shown in the below figure:

- The caster wheel used is shown in below figure:

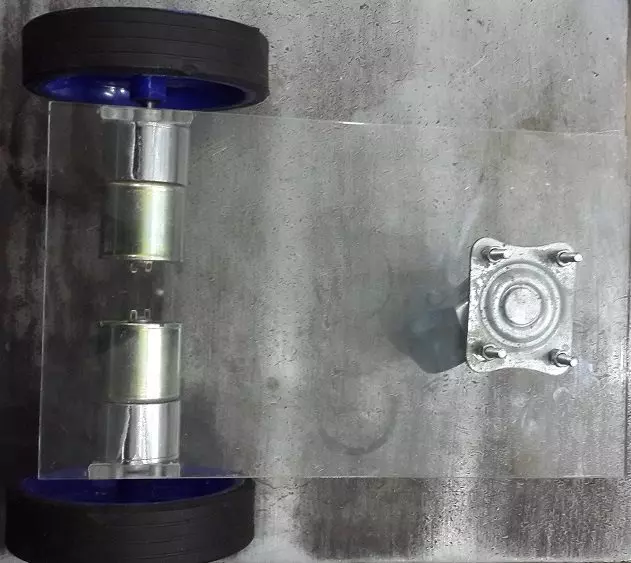
- The coupled DC gear Motor with wheel is shown in below figure:

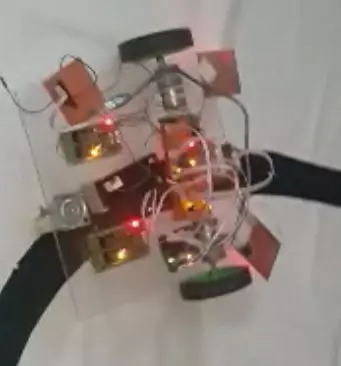
- So I have designed two of such coupled motors and then combining all the above things together, we finally designed our Line Following Robotic Waiter as shown in below figure:
- Now our mechanical Design is ready so let's design the electronic hardware:
Electronic Circuit Design
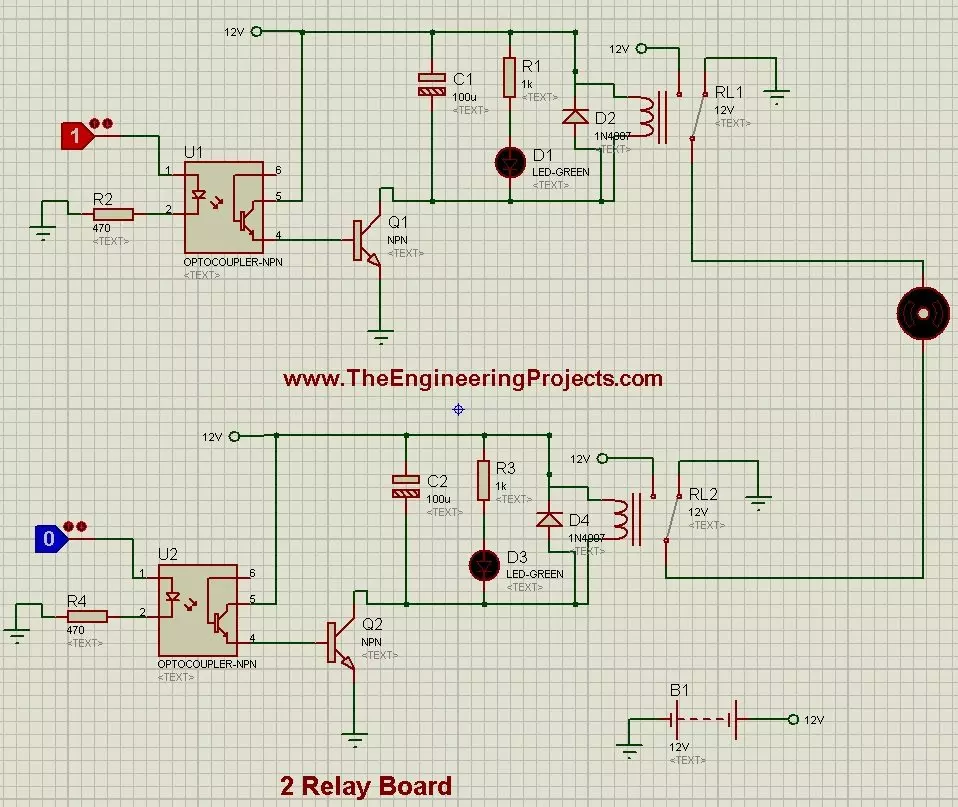
- First of all, I have designed the DC Motor Driver which is also called 2 Relay Board.
- This circuit diagram is shown in below figure:
- Now in order to apply the signals to move the Motors I have used Arduino UNO board.
- Moreover I have placed four IR sensors below this robot.
- Two of these IR sensors are used for line tracking while the remaining two were placed on the sides for detecting the tables on both sides.
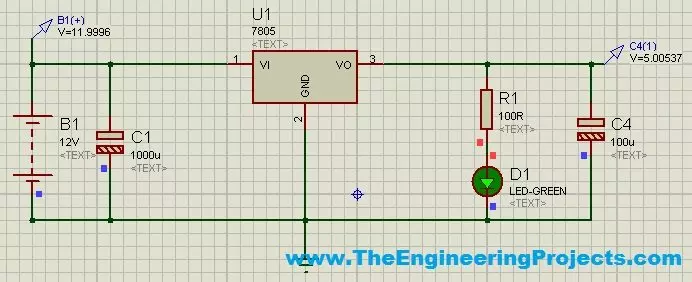
- I have also designed a power supply to convert 12V into 5V.
- The circuit diagram of power supply is as follows:
- So, now let's have a look at the Arduino code required for Line Following Robotic Waiter:
Arduino Code
- Here's the Arduino Code requried for Line Following Robotic Waiter.
#define motorL1 8
#define motorL2 9
#define motorR1 10
#define motorR2 11
#define PwmLeft 5
#define PwmRight 6
#define SensorR 2
#define SensorL 3
#define Sensor3 A0
#define Sensor4 A1
#define TableA A4
#define TableB A2
#define TableC A5
#define TableD A3
int OriginalSpeed = 200;
int TableCount = 0;
int TableCheck = 0;
int RFCheck = 10;
void setup()
{
Serial.begin (9600);
pinMode(motorR1, OUTPUT);
pinMode(motorR2, OUTPUT);
pinMode(motorL1, OUTPUT);
pinMode(motorL2, OUTPUT);
pinMode(PwmLeft, OUTPUT);
pinMode(PwmRight, OUTPUT);
pinMode(SensorL, INPUT);
pinMode(SensorR, INPUT);
pinMode(Sensor3, INPUT);
pinMode(Sensor4, INPUT);
pinMode(TableA, INPUT);
pinMode(TableB, INPUT);
pinMode(TableC, INPUT);
pinMode(TableD, INPUT);
MotorsStop();
analogWrite(PwmLeft, 0);
analogWrite(PwmRight, 0);
delay(2000);
// Serial.println("fghfg");
}
void loop() {
MotorsForward();
if((digitalRead(Sensor3) == LOW) && (TableCheck == 0)){TableCount++; TableCheck = 1;}
if((digitalRead(Sensor3) == HIGH) && (TableCheck == 1)){TableCheck = 2;}
if((digitalRead(Sensor3) == LOW) && (TableCheck == 2)){TableCount++; TableCheck = 3;}
if((digitalRead(Sensor3) == HIGH) && (TableCheck == 3)){TableCheck = 4;}
if((digitalRead(Sensor3) == LOW) && (TableCheck == 4)){TableCount++; TableCheck = 5;}
if((digitalRead(Sensor3) == HIGH) && (TableCheck == 5)){TableCheck = 0;}
if(digitalRead(TableA) == HIGH){RFCheck = 1;}
if(digitalRead(TableB) == HIGH){RFCheck = 2;}
if(digitalRead(TableC) == HIGH){RFCheck = 3;}
if(digitalRead(TableD) == HIGH){RFCheck = 4;}
if(RFCheck == TableCount){Table1();}
PIDController();
}
void MotorsBackward()
{
digitalWrite(motorL1, HIGH);
digitalWrite(motorL2, LOW);
digitalWrite(motorR1, HIGH);
digitalWrite(motorR2, LOW);
}
void MotorsForward()
{
digitalWrite(motorL1, LOW);
digitalWrite(motorL2, HIGH);
digitalWrite(motorR1, LOW);
digitalWrite(motorR2, HIGH);
}
void MotorsStop()
{
digitalWrite(motorL1, HIGH);
digitalWrite(motorL2, HIGH);
digitalWrite(motorR1, HIGH);
digitalWrite(motorR2, HIGH);
}
void MotorsLeft()
{
analogWrite(PwmLeft, 0);
analogWrite(PwmRight, 0);
digitalWrite(motorR1, HIGH);
digitalWrite(motorR2, HIGH);
digitalWrite(motorL1, LOW);
digitalWrite(motorL2, HIGH);
}
void MotorsRight()
{
analogWrite(PwmLeft, 0);
analogWrite(PwmRight, 0);
digitalWrite(motorR1, LOW);
digitalWrite(motorR2, HIGH);
digitalWrite(motorL1, HIGH);
digitalWrite(motorL2, HIGH);
}
void Motors180()
{
analogWrite(PwmLeft, 0);
analogWrite(PwmRight, 0);
digitalWrite(motorL1, HIGH);
digitalWrite(motorL2, LOW);
digitalWrite(motorR1, LOW);
digitalWrite(motorR2, HIGH);
}
void PIDController()
{
if(digitalRead(SensorL) == HIGH){analogWrite(PwmRight, 250);analogWrite(PwmLeft, 0);}
if(digitalRead(SensorR) == HIGH){analogWrite(PwmLeft, 250);analogWrite(PwmRight,0);}
if((digitalRead(SensorL) == LOW) && (digitalRead(SensorR) == LOW)){analogWrite(PwmRight, 0);analogWrite(PwmLeft, 0);}
}
void Table1()
{
TableCount = 0;
MotorsRight();
delay(4000);
while(digitalRead(SensorR) == HIGH);
while(digitalRead(SensorL) == HIGH);
while(1)
{
MotorsForward();
PIDController();
if(digitalRead(Sensor3) == LOW){break;}
}
MotorsStop();
delay(1000);
Motors180();
delay(2000);
while(digitalRead(Sensor3) == HIGH);
while(digitalRead(Sensor3) == LOW);
while(digitalRead(SensorL) == HIGH);
//delay(500);
while(1)
{
MotorsForward();
PIDController();
if(digitalRead(Sensor3) == LOW){break;}
}
//delay(1000);
MotorsLeft();
delay(4000);
while(digitalRead(SensorL) == HIGH);
while(digitalRead(SensorR) == LOW);
while(1)
{
MotorsForward();
PIDController();
if(digitalRead(Sensor3) == LOW){break;}
}
MotorsStop();
delay(1000);
}
- This code will not work for you exactly.
- The robot is following the line so I have placed some value for IR sensors so that my robot can follow.
- When right IR sensor is HIGH then right motor moves a little faster and left motor slows down.
- In this way I am making it to follow the line so you have to change such values in the code.
- If you got into any issue regarding this project then add us on Skype and we will help you out.
- Here's our final robot looks like:
- Here's the video of Line following Robotic Waiter which will give you the better idea of how it worked:
















