Introduction to Electric Motors




















- AC Motors
- DC Motors
Introduction to Electric Motors
- A motor is an electrical device that converts electrical energy into mechanical.
- Motors are designed to produce rotary or linear motion when their electric current and magnetic field interact with each other which is commonly known as electromagnetic interaction – A term coined by Hans Christian Orsted in 1820.
- It was Andre Marie Ampere who explained the generation of mechanical force by this electromagnetic interaction and introduced the Ampere’s Force Law.
Electric Motor Working Principle
- The electric motor working principle mainly depends on the interaction between electric current and magnetic field which is nothing but a Faraday’s law of electromagnetic induction that reads
- “Whenever a current-carrying conductor is placed in the magnetic field, flux is induced in the circuit, due to which a current starts to flow which is called induced current”.
- In simple words, when the electric current is passed through a coil it generates a magnetic field that allows the coil to rotate its own axis.
- The direction of this force is explained by Fleming's left-hand rule which says if the thumb, forefinger, and middle finger of the left hand are placed perpendicular to each other and if the forefinger shows the direction of the magnetic field, the middle finger represents the direction of the current, then the thumb will show the direction of the force.

- Fleming's left-hand rule is applicable for motors and is different than Fleming’s right-hand role which is mainly defined for generators.
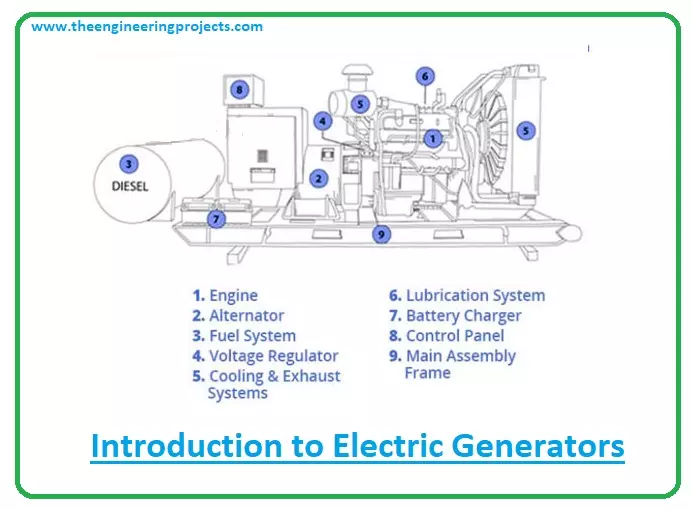
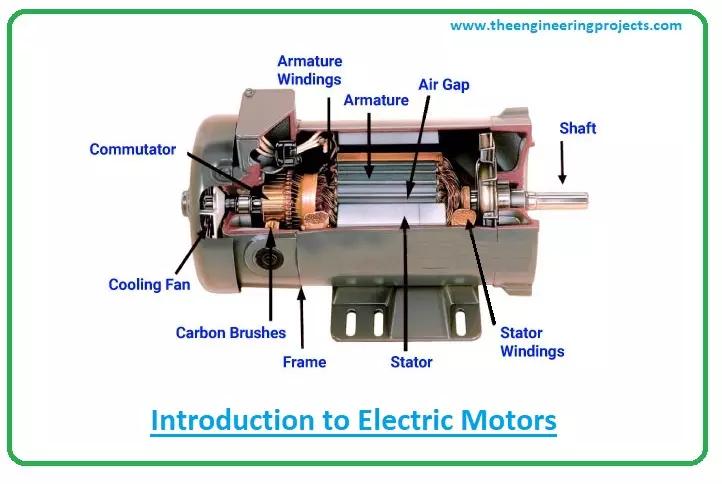
Components of Electric Motor
Here are the main parts of the motor: 1. Rotor 2. Stator 3. Bearings 4. Air gap 5. Windings 6. Commutator- Rotor is the rotating part of the motor that is mainly responsible for delivering the mechanical motion to the shaft or subject attached to it. The rotor comes with conductors that interact with the stator magnetic field to produce the force for turning the shaft.
- Stator is the stationary part (body) of the motor that is mainly composed of permanent magnet or windings. Laminations made up of thin metal are used in stator core for minimizing the energy losses.
- Both rotor and stator, come under the influence of the magnetic field that interacts with an electric current. One magnetic field is generated by permanent magnetic and another is generated by the electromagnet.

- Bearings are used to make the rotor turn on its axis and are supported by motor housing.
- Air gap is the distance between the stator and rotor which is made minimum to avoid magnetizing current and negative effects on the performance.
- Commutator is composed of slip rings that are insulated from each other and are used to toggle the input of the DC motors.
- Windings are nothing but wires wrapped around an iron magnetic core that are responsible for generating magnetic poles in the presence of electric current.
Types of Electric Motors
Two types of motors are mainly used in domestic and industrial applications known as: 1: AC Motors 2: DC Motors1: AC Motors
On the other hand, AC motors, also known as alternating current motors, come with an ability to reverse the current direction with regular intervals. AC motors are further divided into two parts: 1. Synchronous Motors 2. Asynchronous Motors AC motors come with controlled acceleration and low power is required to start them. Controlled starting current & adjustable operating speed is what makes them suitable for instrumentation and industrial applications. Synchronous motors come with constant speed under varying load where the rotation of the rotor is perfectly synchronized with the current frequency, making them an ideal choice for driving a load with constant speed.
- Single-phase induction motors are mostly preferred for smaller loads i.e. mostly used for domestic purposes. While three-phase induction motors are designed to drive large load and are mainly used for industrial applications like pumps, compressors, lifting gear, etc.
2. DC Motors
- DC motors, also known as direct current motors, are the type of motors whose speed is mainly dependent on the intensity of the electric current and they come with the power distribution system.
- Before installing motors on specific machines, make sure the temperature rating of the machine doesn’t exceed the temperature ratings of the motor. Doing so can result in burning the motors and the whole system eventually.
- Load characteristics, power available, cost, and mission goals are very important for motor selection.
- Similarly, running toque plays a key role in determining the motor size. A minor change in load characteristic can cause a drastic change in running toque.

- So, it is wise to keep the supplied torque more than the toque required for a machine going from start to full speed.
- The DC motor speed can be controlled by varying the supply voltage and these motors are variable over a wide range of voltages having high starting torque, easy installation, and quick starting and stopping acceleration.
- The speed control ability makes them a remarkable choice for home appliances, vehicles, and lifts.
1. Brushed DC Motors
In a brushed DC motor, the current flow is mainly dependent on the brush orientation of the stator. These are the most basic type of motors that come with a simple control system design, and can be categories into five major types:a. DC Series Motor
- In DC series motors, field windings and rotor windings are connected in series.
- These motors operate on the electromagnetic principle where rotational motion is produced with a magnetic field generated around the conductor meets and interacts with the external magnetic field.
- These motors provide a speed control with varying voltage, making them suitable for cars, cranes, hoists, and elevators.
- Here torque and motor speed are inversely proportional to each other, increasing one will decrease the other.
b. DC Shunt Wound
- DC shunt motor comes with one voltage supply and a medium level of starting torque where rotor windings and field windings are connected in parallel to each other which is commonly known as a shunt.
- These motors can generate maximum torque when the motor current is increased.
- This generated torque, mind you, doesn’t affect the motor speed.
- Shunt motors mainly run with a constant speed that makes them an ideal choice for many applications including conveyors, grinders, cleaners, and lathes.
c. DC Compound Motors
- DC compound motors are basically a combination of both: shunt and series DC motors where shunt and series windings are present.
- In compound motors, rotor and stator windings can be connected both ways: in series or in parallel to each other with the purpose to integrate the polarity of both windings.

- A small resistance path is created when series windings are developed with copper wires. In order to obtain high input voltage, multiple copper windings are used connected in a shunt.
- These motors are mainly used where high torque is required like centrifugal pumps, compressors, circular saws, conveyors, and shearing machines.
d. Permanent Magnet DC Motors (PMDC)
- %?9
- In PMDC motors, the permanent magnet is used instead of electromagnetic that plays a key role in the motor operation.
- Both armature windings and field windings are present in these motors and a permanent magnet allows to create the flux in the air gap between the rotor and stator.
- The rotor is mainly composed of a commutator, armature core, and armature windings and is almost similar to the regular DC motor in construction.
e. Separately Excited Motor
- Separately excited motors are different than shunt DC motor based on their connection with the energy source.
- In these motors, both rotor and stator are connected with separate power supply where armature windings are used to generate a large amount of flux with an ability to control the shunt value.
2. Brushless DC Motors
- DC brushless motors were mainly designed to operate in hard to reach places. In these motors slip ring or commutator is replaced by an embedded controller for creating a feedback loop.
- They are simpler in terms of mechanical design and more efficient compared to brushed DC motors, making them a great choice for long-lasting and high power applications.
- The motor speed is controlled by an incorporated controller that uses Hall Effect sensors to determine the rotor position.
- These motors are more complicated to handle for the presence of the controller and are more costly than brushed motors. They are mainly used where positional and speed control is required like pumps, fans, compressors.
- Servo motors come with a feedback loop, providing extra control over motor speed. Linear and rotary actuators are used to control torque, speed, and position. These motors are the nuts and bolts of the instrumentation and embedded systems.

- Stepper motors are typically used in open-loop position control and come in four-wire and six wire layout.
- They are controlled electronically by external magnets where rotor can be made either way: with soft metal or a permanent magnet. The rotor teeth are made to rotate from point to point when they interact with the magnetic field.

- Industrial equipment like pick and place systems and printers are mainly composed of stepper motors.
Applications of Electric Motors
- Electric motors are incorporated in blowers, pumps, industrial fans, machine tools, power tools, and household appliances.
- Electric watches impart a useful application of electric motors that are responsible to accelerate the hands in wristwatches which were previously conducted by the mechanical spring method.
- They are differentiated by multiple factors including internal construction, applications, power source and the type of output generated.
- For example, electric motors are used on a large scale where the pump is attached to the motor to lift the water up and distribute it for domestic or agricultural purposes.
- These motors are also embedded in hybrid cars to drive them under a certain limit without petrol.
×
![]()