Hi readers! Hopefully, you are well and exploring technology daily. Today, the topic of our discourse is the FMCW Radar Sensor Optimized for IoT Applications and Health Care Devices. You might already know about it or something new and different.
FMCW radar sensors are becoming one of the leading technologies in non-contact sensing and are very widely used nowadays in IoT and healthcare devices. In general, they have more accuracy, lower power consumption, and good performance on different surfaces. Hence, they can be highly versatile by emitting a continuous wave signal with frequency modulation, capable of detecting motions, measuring distance, and monitoring the presence of people with exceptional accuracy. This non-contact capability is an important feature for applications wher ...
Hi readers! I hope you are fine and spending each day learning more about technology. Today, the subject of discussion is the FlightSense Multi-zone distance sensor with an ultra-wide 90° field of view for presence detection. It may be something you were aware of or something new and unique.
The multi-zone distance sensors are developed by STMicroelectronics. They are high-tech ToF devices that ensure precise, reliable distance measurements. Distance is measured through infrared illumination, measuring the time light takes to return after its reflection off objects. These devices ensure that distance will be accurately calculated regardless of ambient light conditions.
With an ultra-wide 90° field of view (FoV), it is possible to monitor several zones simultaneously, which enables the p ...
Hi readers! Hopefully, you are well and exploring technology daily. Today, the topic of our discourse is the MLX91218 and MLX91219 3.3V/5V sensors with high-accuracy simplify inverter/converter control and battery management. You might already know about it or something new and different.
The Melexis MLX91218 and MLX91219 are magnetic field sensors that are of very high accuracy and are used in applications such as inverter/converter control and BMS. They possess an excellent quality level of accuracy in magnetic field sensing while consuming low power. They are, therefore, one of the best choices for modern electronic applications such as electric vehicles, industrial automation, renewable energy systems, and consumer electronics.
The 3.3V or 5V wide range of voltage supply offers broa ...
Hi readers! Hopefully, you are well and exploring technology daily. Today, the topic of our discourse is the HDC3020 and HDC3020 - Q1 humidity sensors with high accuracy, low power, and drift correction. You might already know about it or something new and different.
The HDC3020 series is from Texas Instruments. It's a digital humidity and temperature sensor, known for high accuracy, reliability, and long-term stability. These sensors incorporate advanced drift correction mechanisms that maintain constant performance over long periods even in harsh or contaminant-rich environments, making it ideal for precision and dependable applications.
The series has two main variants: the general-purpose application HDC3020 and the automotive-grade HDC3020-Q1, which complies strictly with the AEC Q ...
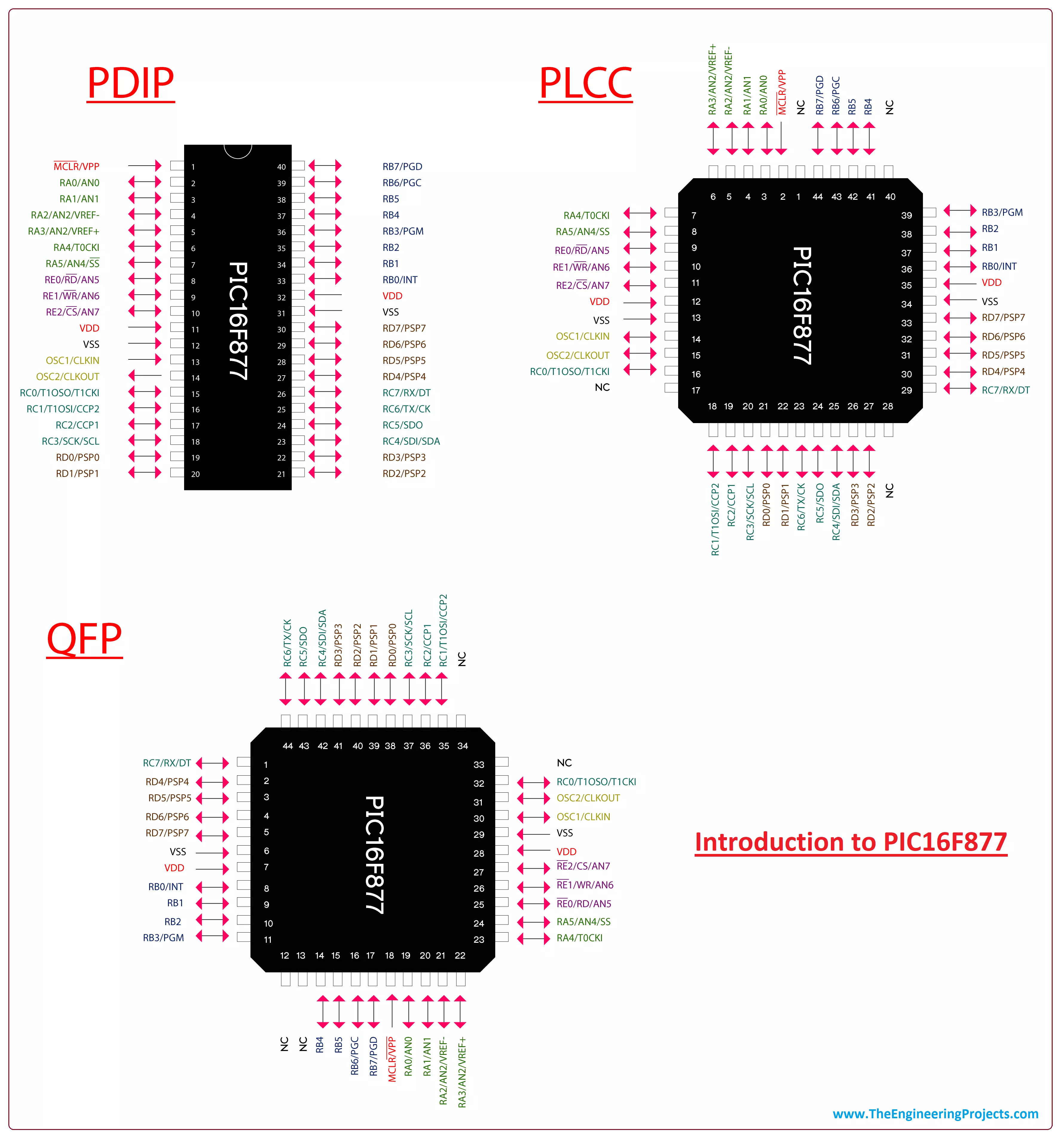
Hey Guys! Hope you are doing well. I am back to give you valuable information as per your technical needs and requirements. Today, I’ll unlock the detailed Introduction to PIC16F877.
It is an 8-bit PIC microcontroller that comes with 40-pin interface (PDIP). It is based on Flash type memory. The High-Performance RISC CPU is incorporated inside the device that comes with only 35 single-word instructions, targeting mainly two types of instructions: single cycle and double-cycle.
In this post, I'll cover each and everything related to PIC16F877: its features, pinout and pin description, main functions, memory interface, compiler and burner used and applications. Let's dive right in and get down to the nitty-gritty of this tiny device.
Introduction ...
Hi Guys! Hope you are doing well. I am back to keep you updated with valuable information related to engineering and technology. Today, I'll discuss the detailed Introduction to JK Flip Flop. It is a flip-flop, also known as a latch circuit, that can be either active-high or active-low based on the signal applied. It is an improved version of the SR Flip Flop and prevents the circuit from going in an invalid state. As the name suggests, it helps the circuit toggle between two states.
The JK flip-flop is named after his inventor known as Jack Kilby from Texas Instruments. The JK Flip-flop is also widely known as a programmable flip-flop as it can disguise other flip-flops based on the inputs applied.
There is a slight difference between Flip-f ...
Hey Fellas! Hope you are doing well. I feel pleasure to have you on this platform. Today, I'll discuss the detailed Introduction to Arduino Duemilanove which is a Microcontroller Board, introduced by Arduino.cc and is based on ATmega168 or ATmega328. It comes with 14 pins that can be used both ways: Input or Output. Duemilanove means "2009" in Italian.
Arduino boards have always been a good pick for hobbyists and students who intend to design projects that are mainly related to embedded system and automation. These boards are similar to microcontrollers, with little advantage over them as they come with some built-in peripheral features, setting you free from buying external components to employ automation in your project.
If we focus on Arduino ...
Hi Guys! Hope you are getting along with life pretty well. I always strive to keep you updated with most valuable information related to engineering and technology. Today, I'll discuss the detailed Introduction to Arduino Leonardo. It is a microcontroller board based on the ATmega32U4 and comes with 23 digital input/output pins. It is developed by Arduino.cc, aiming to provide easy to use interface with the ability to perform a number of functions on a single chip.
It incorporates everything required to drive the automation in the relevant project. Simply connect this device with the USB cable or power it up using DC adapter and start playing with it
In this post, I'll try to cover each and everything related to Arduino Leonardo, so you don't n ...
Hey Guys! Hope you are getting along with life pretty well. Welcome you onboard. Today, I'll unlock the details on the Introduction to Arduino Micro. It is a Micro board, based on the ATmega32U4 microcontroller and comes with built-in USB, making it easily compatible with the computer.
Arduino Micro, as the name suggests, is the smallest board in the Arduino Community. It is comparable to its counterparts like Arduino Nano and Arduino Promini.
In this tutorial, I'll discuss each and everything related to Micro board including its main features, pinout, pin description, the software used and applications. Let's dive in and explore everything you need to know about this tiny board.
Introduction to Arduino Micro
Arduino Micro is the smallest boa ...
Hi Fellas! I am back to give you a daily dose of valuable information. Today, I'll give you a detailed Introduction to IRF3205. It is an N-Channel HEXFET Power MOSFET that comes in a TO-220AB package and operates on 55V and 110A. It is mainly used for dynamic dv/dt rating and consumer full bridge applications.
Additionally, it falls under the category of ultra LOW on-resistance devices based on Advanced Process Technology, making it a building block of the electronic applications where fast switching is a major concern.
In this post, I'll cover each and everything related to this transistor, its main features, working, pinout, and applications. Let's get down to the nitty-gritty of this tiny component.
Introduction to IRF3205
IRF3205 is an N- ...