

PWM, as the name suggests, is simply a pulse width modulation. We take a pulse and then we modulate its width and make it small or big. Another term important while studying PWM is named duty cycle. The duty cycle shows the duration for which the PWM pulse remains HIGH. Now if the pulse remains high for 50% and LOW for 50% then we say that PWM pulse has a duty cycle of 50%. Similarly, if the pulse is HIGH for 70% and Low for 30% then it has a duty cycle of 70%.
Most of the microcontrollers have special pins assigned for PWM as in Arduino UNO it has 6 PWM pins on it. Similarly, PIC Microcontrollers also have PWM pins but unfortunately, the 8051 Microcontroller doesn't have this luxury means there are no special PWM pins available in 8051 Microcontroller. But PWM is necessary so we are going to manually generate the PWM pulse using Timer0 interrupt. So, before reading this tutorial you must first read How to use Timer Interrupt in 8051 Microcontroller so that you understand the functioning of Timer Interrupt. Anyways, let's get started with the generation of PWM in the 8051 Microcontroller.
| Where To Buy? | ||||
|---|---|---|---|---|
| No. | Components | Distributor | Link To Buy | |
| 1 | 8051 Microcontroller | Amazon | Buy Now | |
How to Generate PWM in 8051 Microcontroller ???
- You can download both the simulation and the programming code for PWM in 8051 Microcontroller by clicking the below button:
- First of all, design a simple circuit as shown in the below figure:

- Now what we are gonna do is we are gonna generate a PWM pulse using timer0 interrupt and then we are gonna send it to P2.0.
- I have attached an oscilloscope on which we can easily monitor this PWM pulse and can check whether it's correct or not.
Code in Keil uvision 3
- Now, copy the below code and paste it into your Keil uvision software. I have used Keil uvision 3 for this code compiling.
#include<reg51.h>
// PWM_Pin
sbit PWM_Pin = P2^0; // Pin P2.0 is named as PWM_Pin
// Function declarations
void cct_init(void);
void InitTimer0(void);
void InitPWM(void);
// Global variables
unsigned char PWM = 0; // It can have a value from 0 (0% duty cycle) to 255 (100% duty cycle)
unsigned int temp = 0; // Used inside Timer0 ISR
// PWM frequency selector
/* PWM_Freq_Num can have values in between 1 to 257 only
* When PWM_Freq_Num is equal to 1, then it means highest PWM frequency
* which is approximately 1000000/(1*255) = 3.9kHz
* When PWM_Freq_Num is equal to 257, then it means lowest PWM frequency
* which is approximately 1000000/(257*255) = 15Hz
*
* So, in general you can calculate PWM frequency by using the formula
* PWM Frequency = 1000000/(PWM_Freq_Num*255)
*/
#define PWM_Freq_Num 1 // Highest possible PWM Frequency
// Main Function
int main(void)
{
cct_init(); // Make all ports zero
InitPWM(); // Start PWM
PWM = 127; // Make 50% duty cycle of PWM
while(1) // Rest is done in Timer0 interrupt
{}
}
// Init CCT function
void cct_init(void)
{
P0 = 0x00;
P1 = 0x00;
P2 = 0x00;
P3 = 0x00;
}
// Timer0 initialize
void InitTimer0(void)
{
TMOD &= 0xF0; // Clear 4bit field for timer0
TMOD |= 0x01; // Set timer0 in mode 1 = 16bit mode
TH0 = 0x00; // First time value
TL0 = 0x00; // Set arbitrarily zero
ET0 = 1; // Enable Timer0 interrupts
EA = 1; // Global interrupt enable
TR0 = 1; // Start Timer 0
}
// PWM initialize
void InitPWM(void)
{
PWM = 0; // Initialize with 0% duty cycle
InitTimer0(); // Initialize timer0 to start generating interrupts
// PWM generation code is written inside the Timer0 ISR
}
// Timer0 ISR
void Timer0_ISR (void) interrupt 1
{
TR0 = 0; // Stop Timer 0
if(PWM_Pin) // if PWM_Pin is high
{
PWM_Pin = 0;
temp = (255-PWM)*PWM_Freq_Num;
TH0 = 0xFF - (temp>>8)&0xFF;
TL0 = 0xFF - temp&0xFF;
}
else // if PWM_Pin is low
{
PWM_Pin = 1;
temp = PWM*PWM_Freq_Num;
TH0 = 0xFF - (temp>>8)&0xFF;
TL0 = 0xFF - temp&0xFF;
}
TF0 = 0; // Clear the interrupt flag
TR0 = 1; // Start Timer 0
}
- I have added the comments in the above codes so it won't be much difficult to understand. If you have a problem then ask in the comments and I will resolve them.
- Now in this code, I have used a PWM variable and I have given 127 to it as a starting value.
- PWM pulse varies from 0 to 255 as it's an 8-bit value so 127 is the mid-value which means the duty cycle will be 50%.
- You can change its value as you want it to be.
Proteus Simulation Result
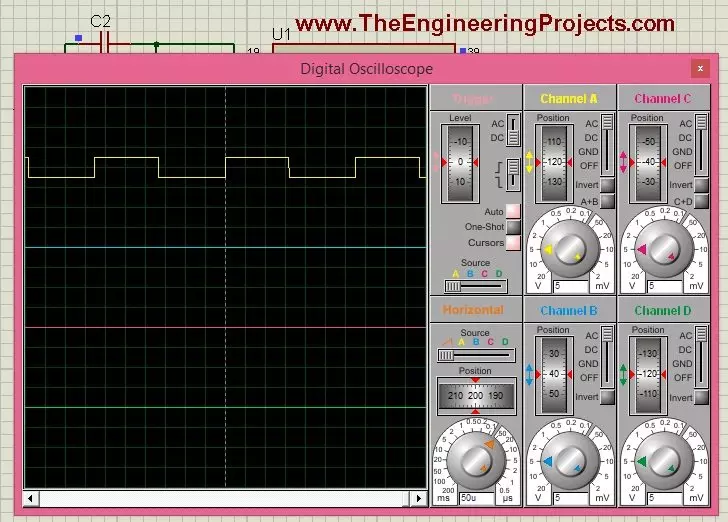
- So, now when you upload the hex file and run your simulation then you will get below results:
- Now you can check in the above figure that the duration of HIGH and LOW is the same means the pulse is HIGH for 50% and LOW for the remaining 50% cycle.
- Now let's change the PWM duty cycle to 85 which is 1/3 and it will generate a PWM pulse of 33% duty cycle. Here's the result:
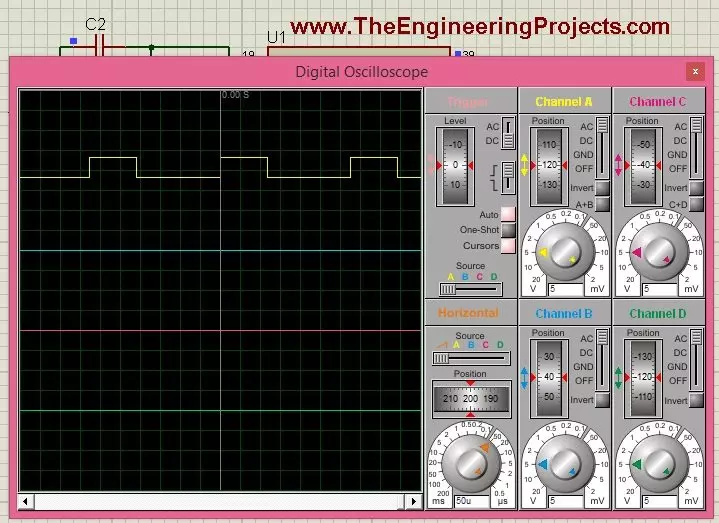
- Now you can easily compare the above two figures and can get the difference. In the above figure now the duty cycle has decreased as the HIGH timing of the pulse is now reduced to 1/3 and pulse is LOW for 2/3 of the total time.
